Tipul proiectului: PN III, Proiect Experimental Demonstrativ (PED)
Contractor: Universitatea din Craiova
Director de proiect: Prof. univ. dr. ing. Mihai LUNGU (Universitatea din Craiova)
Autoritatea contractanta: UEFISCDI
Durata contractului: 24 luni
Valoarea contractului: 598.795 lei
PROIECT NR. 665PED/2022
PLATFORMA SOFTWARE SI HARDWARE BAZATA PE CONTROLUL DE TIP BACKSTEPPING SI SISTEM DE NAVIGATIE INERTIALA DE TIP STRAP-DOWN PETRU VEHICULE SPATIALE
Rezumatul proiectului:
Proiectul urmareste realizarea unui modul experimental ambarcabil, utilizat in monitorizarea, ghidarea si controlul vehiculelor spatiale suborbitale si orbitale. In cadrul proiectului, vor fi proiectate si dezvoltate doua componente experimentale:
1) un model virtual al vehiculelor spatiale de tip racheta, bazat pe chestiunile teoretice si implementat ca simulator intr-un computer dedicat cu capacitate de comunicare de tip MIL-STD-1553/CAN/Ethernet/I2C impreuna cu un software complex si reconfigurabil pentru simularea perturbatiilor induse de senzori, precum si o interfata de configurare, executie si vizualizare pentru gestionarea tractiunii si alegerea tipului de vehicul spatial;
2) o unitate de control de tip ambarcabil cu hardware si software dedicate ce implementeaza: 2.1) legi de control bazate pe tehnica “backstepping”; 2.2) un navigator de tip strap-down ce utilizeaza un algoritm bazat pe teoria quaternionilor si metode de integrare ce minimizeaza erorile de determinare a atitudinii, vitezei si pozitiei.
Obiectivele proiectului:
Obiectivul principal:
Obiectivul principal al proiectului este dezvoltarea a doua componente hardware-software integrate care, pe de o parte, simuleaza comportamentul vehiculelor spatiale orbitale si sub-orbitale si, pe de alta parte, asigura controlul si monitorizarea acestor vehicule.
Obiective specifice:
O1: Dezvoltarea unui simulator software pentru vehicule spatiale cu masa variabila;
O2: Dezvoltarea modelului de perturbatii pentru datele senzorilor inertiali;
O3: Proiectarea si validarea prin simulari numerice a sistemului de navigatie inertiala de tip strap-down;
O4: Proiectarea si implementarea software a controllerului bazat pe metoda pasului inapoi (backstepping);
O5: Validarea prin simulari numerice a sistemului integrat;
O6: Dezvoltarea si testarea experimentala a structurii finale pentru platforma integrata software/hardware;
O7: Diseminarea rezultatelor in mediul stiintific, academic si socio-economic;
O8: Managementul activitatilor.
Echipa de cercetare a proiectului:
Coordonator - Universitatea din Craiova
1. Mihai Lungu – Director de proiect (Universitatea din Craiova)
2. Romulus Lungu – Cercetator (Universitatea din Craiova)
3. Alexandru Tudosie – Cercetator (Universitatea din Craiova)
4. Lucian Barbulescu – Cercetator (Universitatea din Craiova)
5. Florentin Alin Butu – Cercetator postdoctorand (Universitatea din Craiova)
6. Claudia Craciunoiu (Efrim) – Cercetator doctorand (Universitatea din Craiova)
Partener - Academia Tehnica Militara "Ferdinand I" Bucuresti
1. Teodor Lucian Grigorie – Responsabil proiect (Academia Tehnica Militara "Ferdinand I" Bucuresti)
2. Nicolae Jula – Cercetator (Academia Tehnica Militara "Ferdinand I" Bucuresti)
3. Ciprian Larco – Cercetator (Academia Tehnica Militara "Ferdinand I" Bucuresti)
4. Razvan Viorel Mihai – Cercetator postdoctorand (Academia Tehnica Militara "Ferdinand I" Bucuresti)
5. Ioana Carmen Boglis – Cercetator doctorand (Academia Tehnica Militara "Ferdinand I" Bucuresti)
Structura proiectului:
I. Proiectarea simulatorului software pentru miscarea spatiala a rachetei. Modelarea si analiza senzorilor inertiali (6 luni / 2022)
I.1. Modelarea si implementarea software a miscarii spatiale a rachetei
I.2. Managementul profilelor "thrust"
I.3. Modelarea si analiza performantelor senzorilor
I.4. Subrutine software reconfigurabile pentru modelele de senzori inertiali; analiza functionarii
I.5. Diseminarea rezultatelor
II. Proiectarea navigatorului inertial strap-down si a controllerului bazat pe metoda backstepping (12 luni / 2023)
II.1. Definirea traiectoriei de referinta a rachetei
II.2. Modelarea si implementarea software a perturbatiilor ce afecteaza zborul rachetei pe traiectorie
II.3. Dezvoltarea unei interfete Java pentru comunicarea cu senzorii inertiali
II.4. Proiectarea navigatorului inertial strap-down
II.5. Subrutine software reconfigurabile pentru navigatorul inertial de tip strap-down
II.6. Proiectarea controllerului backstepping
II.7. Subrutine software pentru controllerul backstepping
II.8. Dezvoltarea unei interfete Matlab/Simulink pentru simulatorul vehiculului spatial
II.9. Model Matlab/Simulink integrat pentru racheta controlata
II.10. Diseminarea rezultatelor
III. Simularea si validarea experimentala a platformei software/hardware (6 luni / 2024)
III.1. Testare numerica pentru diferite scenarii si traiectorii
III.2. Proiectare interfata pentru configurare, executie si vizualizare
III.3. Generare cod C pentru a face compatibile unitatea de control experimentala, navigatorul si controllerul
III.4. Integrarea si testarea experimentala, in conditii de laborator, a platformei software/hardware
III.5. Diseminarea rezultatelor
Rezultate preconizate/realizate:
Etapa I (2022 - 6 luni):
- Simulator software pentru vehicule spatiale (rachete) cu masa variabila - miscarea spatiala a rachetei (Realizat)
- Modele ale senzorilor inertiali (Realizat)
- Pagina web a proiectului (Realizat)
- Raport stiintific de faza (Realizat)
Etapa II (2023 - 12 luni):
- Simulator software pentru vehicule spatiale (rachete) cu masa variabila - traiectorie de referinta si perturbatii (Realizat)
- Navigator inertial strap-down (Realizat)
- Sistem de control bazat pe metoda backstepping (Realizat)
- Pachete software (instrumente software) (Realizat)
- Sesiune speciala in cadrul unei conferinte internationale (Realizat)
- Publicare articole la reviste si conferinte (Realizat)
- Raport stiintific de faza (Realizat)
Etapa III (2024 - 6 luni):
- Platforma hardware (Realizat)
- Pachete software (instrumente software) (Realizat)
- Publicare articole la reviste si conferinte (Realizat)
- Raport stiintific de faza/final (Realizat)
Lucrari publicate/sesiuni speciale organizate:
1. Lungu, M., Chen, M., Vilcica (Dinu), D.A. Backstepping-and Sliding Mode-Based Automatic Carrier Landing System with Deck Motion Estimation and Compensation. Aerospace (ISI Journal), ISSN: 2226-4310, vol. 9, nr. 11, 2022.
2. Lungu, R., Butu, F.A.,Lungu, M., Chen, M. Automatic Control of Launch Vehicles’ Flight Path Slope Angle by means of the Backstepping Control Method. 9-th IEEE International Conference on Control, Decision and Information Technologies, 3-6 iulie 2023, Roma, Italia (ISI Proceedings).
3. Lungu, R., Butu, F.A., Lungu, M., Chen, M. Adaptive Control of the Relative Position for Space Vehicles in the Rendezvous Missions. IEEE International Conference on System Theory, Control and Computing (ICSTCC), 11-13 octombrie 2023, Timisoara, Romania (ISI Proceedings).
4. Lungu, R., Butu, F.A., Lungu, M., Wang, R. Robust Optimal Control of Spacecraft During the Rendezvous Missions Using H∞ Control Method. IEEE International Conference on System Theory, Control and Computing (ICSTCC), 11-13 octombrie 2023, Timisoara, Romania (ISI Proceedings).
5. Butu, F.A., Lungu, R., Lungu, M., Barbulescu, L. Software and Hardware Platform Using Dynamic Inversion and Neural Networks for the Launch Vehicles. IEEE International Conference on System Theory, Control and Computing (ICSTCC), 11-13 octombrie 2023, Timisoara, Romania (ISI Proceedings).
6. Sánchez Medel, J.A., Aldana, N., Lungu, M., Flores, G. Nonlinear Model Predictive Control of a Satellite Attitude Dynamics in SO(3). IEEE International Conference on System Theory, Control and Computing (ICSTCC), 11-13 octombrie 2023, Timisoara, Romania (ISI Proceedings).
7. Barbulescu, L., Butu, F.A., Mamuleanu, M., Radulescu, V. On the Computation of the Albedo Force Perturbation on Low earth Orbit Cubestas. IEEE International Conference on System Theory, Control and Computing (ICSTCC), 11-13 octombrie 2023, Timisoara, Romania (ISI Proceedings).
8. Lungu, M., Grigorie, L.T., Butu, F.A., Wang, R. Automatic Attitude Control of the Launch Vehicles by means of the Backstepping Control Method. IEEE/IFAC International Conference on Control, Automation and Diagnosis (ICCAD), 15-17 mai 2024, Paris, Franta (ISI Proceedings).
9. Organizarea Sesiunii Speciale Monitoring, Guidance and Control of Space Vehicles, Parts I & II, în cadrul conferintei internationale IEEE International Conference on System Theory, Control and Computing (ICSTCC), Timisoara, Romania, Octombrie 11-13, 2023. Organizatori: Mihai Lungu, Lucian Barbulescu, Ciprian-Marius Larco, Critian Vidan.
Proiectul de cercetare intitulat ”Platforma software si hardware bazata pe controlul de tip backstepping si sistem de navigatie inertiala de tip strap-down petru vehicule spatiale” creeaza o perspectiva noua asupra controlului atitudinii si traiectoriei modelului virtual al unei rachete purtatoare prin intermediul unui controller numeric experimental ce implementeaza o lege de control adaptiv bazata pe tehnica de control „backstepping” si utilizeaza informatiile primite de la un sistem de navigatie inertial ce utilizeaza un algoritm de navigatie inertial bazat pe algebra quaternionica. Echipa proiectului este formata din Universitatea din Craiova si Academia Tehnica Militara ”Ferdinand I”, consortiul oferind o resursa umana inalt specializata si o infrastructura de cercetare de inalta calitate.
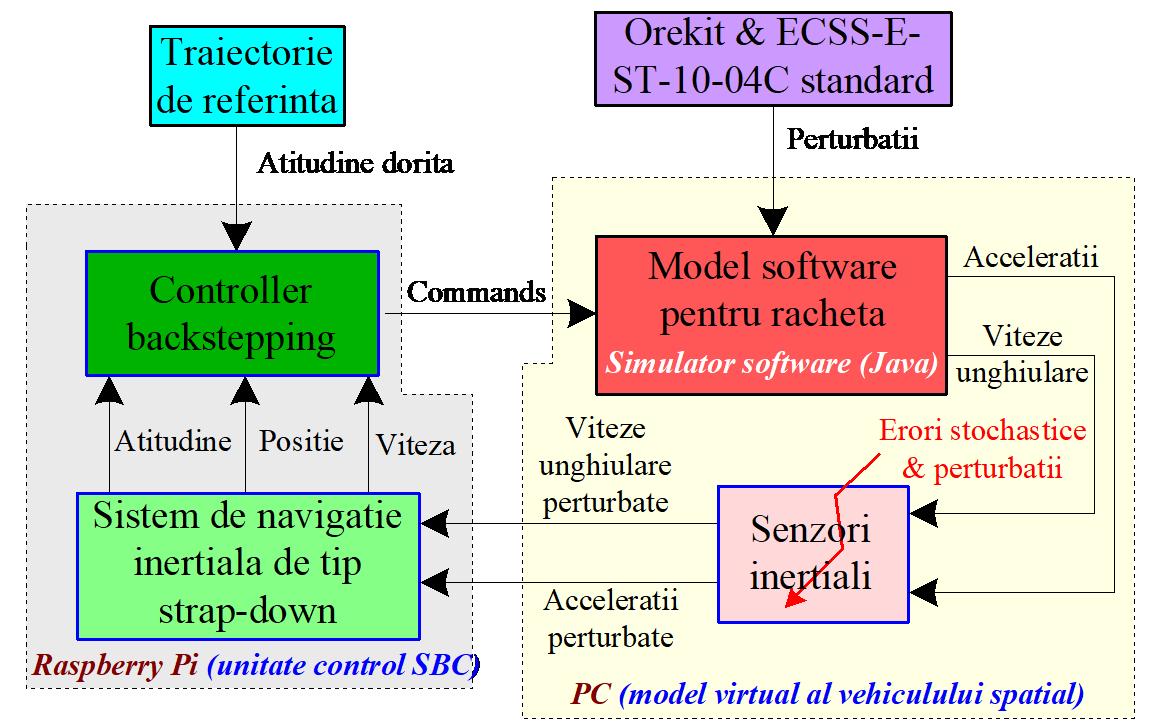
Rezultatul principal al proiectului este un modul experimental ambarcabil, utilizat in controlul traiectoriei rachetelor, fiind proiectate si dezvoltate doua componente experimentale: i) un model virtual al rachetei, implementat ca simulator intr-un computer dedicat cu capacitate de comunicare impreuna cu un software complex si reconfigurabil pentru simularea perturbatiilor induse de senzori, precum si o interfata de configurare, executie si vizualizare pentru gestionarea tractiunii si alegerea tipului de vehicul spatial; ii) o unitate de control ambarcabila de tip Raspberry Pi, cu hardware si software dedicate, ce implementeaza legi de control bazate pe tehnica “backstepping” si un navigator inertial de tip strap-down ce utilizeaza un algoritm bazat pe teoria quaternionilor si metode de integrare ce minimizeaza erorile de determinare a atitudinii, vitezei si pozitiei rachetei.
Principalele borne in realizarea modelului tehnologic inovator au fost: 1) Proiectarea simulatorului software pentru miscarea spatiala a rachetei; 2) Modelarea si analiza senzorilor inertiali; 3) Proiectarea navigatorului inertial strap-down; 4)Proiectarea controllerului bazat pe metoda backstepping; 5) Simularea si validarea experimentala a platformei software/hardware. Validarea s-a facut in doua etape: i) Model in the loop – simulatorul vehiculului spatial, controllerul de tip „backstepping” si navigatorul inertial ruleaza pe acelasi computer; ii) Hardware in the loop – controllerul si navigatorul inertial sunt incorporate intr-o placa dedicata (unitate de control experimentala) care comunica cu simulatorul prin intermediul unei conexiuni ethernet directe folosind un protocol simplu peste TCP/IP.
Contact:
Director de proiect: Prof. dr. ing Mihai LUNGU
E-mail: Lma1312@yahoo.com, mlungu@elth.ucv.ro
Universitatea din Craiova
Facultatea de Inginerie Electrica
B-dul Decebal, nr. 107, Cod postal: 200440, Craiova, Dolj, Romania